
�������: 1-15 ���鵽����ѧ ��������ؼ�¼68�� . ��ѯʱ��(0.267 ��)

����Ȼ��ͨѶ��������άԺʿ����������ڡ���������������������̬���������½�չ��ͼ��
��Ȼ��ͨѶ ��ά ������ ������ ���� ����̬ ������ �����Ӿ�
2024/4/16
Ϊ��ץ�˹����ܷ�չ���ش�ս�Ի������ҹ��ڡ���һ���˹����ܷ�չ�滮������ȷָ��Ҫ������չ���г����ܵ������Ӿ����м����о�������̬�����Ӿ�Ӳ����Ϊ���й���Ϣ��֪����Ϣ��������Ϣ�洢����˼ά���жϹ��ܵ������������ǹ��������Ӿ���֪��ʵ�ֳ��������Դ���ĺ��IJ��������˹����ܡ������Ӿ������ܼҾӡ��Զ���ʻ����ҵ��⡢����ҽѧ�����ǻ۽�����������ֳ���չDZ������ͳ����̬�Ӿ�ϵͳͨ�������е�Ԫ��...

�ڰ˽����������˴�ᡪ������������ؼ��������������������˴�����ƾ������Ϸ��Ƽ���ѧ�ٰ죨ͼ��
��������� �Ϸ��Ƽ���ѧ
2023/11/30
2023��11��24-26�գ��ڰ˽����������˴�ᡪ������������ؼ��������������������˴�����ƾ������Ϸ��Ƽ���ѧ���С���������ѧ��У�����������ڣ����������ѧЭ����У�����꿪���ڣ���������ɽ���˲ž־ֳ�֣������ڻ�����Э�ḱ���鳤̷ά�ѣ��������˲�ר�����ϻḱ�᳤����������ҵ������ҵ��������첩ʿ��ʷ����ʿ����������ʿ��ר��ѧ�ߣ���У���Ժϵ�����˼�����ȫ��30������У����е�λ��300��λר...
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars����������ЧӦ�Ŀɱ�նȽṹ�Ͳ��������������������е�Ӧ��
����ЧӦ �ɱ�նȽṹ ���� ���������
2023/11/29
���������������ܻ����������е����˷�������ɴ�Χ���Ρ��ɱ�������ʵ������������ӻ�����Ӧ��ǿ���˻�������ȫ�Ըߵ�Ӧ�����ƶ��ܵ��㷺��ע����������ЧӦ��jamming transition���Ŀɱ�ն����������������˶��е�ȫ�����ԣ��Ӳ����ϸ����˻����ˡ����Ტ�á�����������������ǿ��������Ӧ��ͬ����������Χ����������������Ӧ�����˻������Ļ���������߰�ȫ�ԡ����������������˿ɱ�նȻ�������ЧӦ...

�����ڼ��μ�������������˵���ơ���ģ�Ϳ��ơ�������̳���У�ͼ��
���μ��� ��������� ��� ��ģ ���� ������̳
2024/3/27
2023��10��20�����磬������Ĵ�ѧ��е�������Զ�������ϵ�������ڷ����ν������ͻ���ũҵ��ѧ��ѧԺ������̳���ԡ����ڼ��μ�������������˵���ơ���ģ�Ϳ��ơ�Ϊ�����ڹ���¥A111�����������ʦ�����н����������ɻ���ũҵ��ѧ��ѧԺ��ҫ����ʦ���֡�
�������������ռ������ߵ�ʹ��õ�������ᣬ������ָ�Ҳ���졣Ȼ������������е�ijߴ����Ƶ��������ѶȼӴ��ر�������խ�����ӵ��ڲ������в������������������˼���������Ч�ؽ��������⣬�ر������ô������������ˣ�����ʵ�־�ȷ�ĵ������������;�ϸ�������ѳ�Ϊ��������������ż��������ڵ����ʵ��ھ������崴�ڵijߴ����ƣ���������е�Ĵ�С���ܶ��ܵ��˾��ޣ����Խ�һ���Ż������ڣ���ʿ��������������ѧ...

�Ϸ��Ƽ���ѧ��е����Դ����ϵ����ǿ���������ŶӺ�������������������ȡ���½�չ��ͼ��
����ǿ ������ ��������� Advanced Intelligent Systems
2023/11/30
���գ��Ϸ��Ƽ���ѧ��е����Դ����ϵ����������ǿ�ŶӺʹ�����Ժʿ�ŶӺ����ڻ�������������ڿ�Advanced Intelligent Systems�Ϸ�����һƪ���ڸ������Ընȷ������������˵��о����ģ����ı���Ϊ ��Soft Robots for Cluttered Environments Based on Origami Anisotropic Stiffness Structure (OASS...
����ִ�������������̶ȸߡ����ɶȴ�����Ӧ��ǿ���ص㣬��ҽ�Ʊ��������ӵ��ο�̽�������й㷺��Ӧ��ǰ������������ѹ��ϵͳ�벻�������Ҹ��Եı����������豸�������������ִ�����ijߴ���ƶ��ԣ��Լ���������е�Ӧ�á�Һ-����临�ϲ�����һ�������Ե������в���Һ-�������϶��γɵ����ܲ��ϡ����¶ȴﵽ���Ϸе�ʱ��Һ����������ѹ�����������ϲ������ͣ����ÿ��Һ�ζ����Կ�����һ��������Ԫ��ͨ�����ַ�ʽ����...
�Ϸ��Ƽ���ѧ��е����Դ����ϵ����ǿ�Ŷ�������������תִ��������ȡ�ý�չ
����ǿ ���� ���� ��ת ִ���� ���������
2023/11/30
���գ��Ϸ��Ƽ���ѧ��е����Դ����ϵ����������ǿ�Ŷ�������������תִ����������ȡ���½�չ, ��سɹ��ԡ�Origami-inspired soft twisting actuator�� Ϊ�ⷢ���ڻ����������ڿ���Soft Robotics (SoRo)�����������˶Ի����и߶ȵ���Ӧ�ԣ�ͬʱ�������˻��������棬������������ȴ�ͳ�ĸ��Ի����˾��б����ϵİ�ȫ�ԡ���Ȼ��������Ȼ���������˵����������ͺ�����...
������һ�ڡ���ѧ��չ����־����������������������ѧ���о���Ա��������һ�ֽ��ܵ����������ˣ�������Ӿ�ٶȱ���ǰ����Ӿ���������˿�4�����ϡ���Щ�����˱���Ϊ�����������ˡ�����Ϊ���ǵ���Ӿ���������������Ӿʱ�ֱ۵Ķ�����
���գ��ɹ��ʵ������ӹ���ʦЭ�ᣨIEEE�����죬��������ѧ�а��IEEE���������˹��ʻ��飨IEEE INTERNATIONAL CONFERENCE ON SOFT ROBOTICS, RoboSoft 2022�������������˱������������»�Ͼ��У��Ͽƴ�ѧ����Ӳμ��ƶ���������Ŀ����ھ���

2022��3��29�գ��й���ѧԺ�����Ƚ������о�Ժ���������ܷ��������Ŷ����ͻ���������ȡ���½�չ�������ͬ�ų��¶�������������ͻ����˽�����ͬ�ų������Զ������Ƶ����⣬�Ŷ������һ����ȫ����Ķ�����������ͻ����˶������Ʋ��ԣ��״�ʵ����4�����������ͻ����˵Ķ���λ�ÿ��ƺ�3�����������ͻ����˵Ķ���·��������ơ�

�й���ѧԺ�����Զ����о����������������������������о�ȡ�ý�չ��ͼ��
������������ ����������� ���ʹ�����������ˮ����
2022/4/29
2021��12�£��й���ѧԺ�����Զ����о������������ڴ������������������������˷���ȡ�����µĽ�չ������4D��ӡ�����Ʊ��������������ڽ������ʹų������������£�չʾ�������α䡢��ȡ�����˹��ܣ����ṹ���ˡ�ҩ����͵ȷ�����ʾ����Ҫ��Ӧ��ǰ�����о��ɹ��������п�Ժһ��Top�ڿ�Composites Part B-Engineering�� �����������ڲ������仯���ⲿ������Ӧ��������״���κ���...
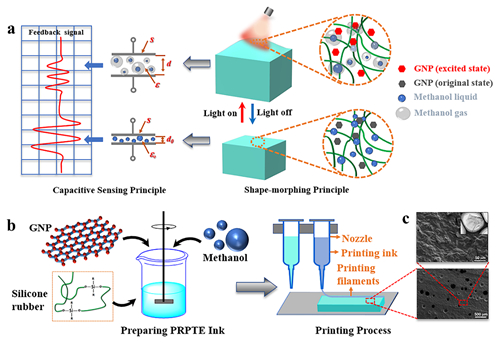
������ҵ��ѧ�о���Ա��Cell Reports Physical Science����������е������о��ɹ���ͼ��
������ҵ��ѧ Cell Reports Physical Science �����е�� ���������
2021/10/13
�������������������ˡ����о���Ѹ�ٳ�Ϊѧ����һ�����ܹ�ע���ȵ���������������(Soft Robotics)��һ��ȫ�µĻ�еϵͳ���ڶ��������о��м����Ӧ��ǰ�������գ�������ҵ��ѧ�ž�ʫ��������������ͨ��ѧ������������ѧ���廪��ѧ�Լ���۳��д�ѧ���о���Ա�����������һ�ֿ����������ε�������е�ۣ����������խ�����Ļ����е��������Ҿ߱��նȿɵ���������˺��˶����ŵȹ�����ȷ���ڲ��������л�е�۵�λ...

�Ϻ���ͨ��ѧ�������о����Ŷ��о���Ʋ�����֪һ�廯��������֫�֣�ͼ��
������֪һ�廯 ������֫�� ���ɼ�������봥�� ���������֫����
2022/4/21
2021��8��16�գ�����Ȼ������ҽѧ���̡���Nature Biomedical Engineering�����߷������Ϻ���ͨ��ѧ��е�붯������ѧԺ�������о������������ȹ�ӭ���ں���ʡ����ѧԺ��ѡ�ؽ��ڵĺ������ġ�������֪һ�廯��������֫�֡���A soft neuroprosthetic hand providing simultaneous myoelectric control and ta...

�Ϻ������е�붯������ѧԺ�������о��������������Ŷ��ڸ�����������������ѹ��Ƥ���о���ȡ���½�չ��ͼ��
���ߵ��ݻ��� ��������Ƥ�� ����ѹ��Ƥ�� ���ߵ���ѹ��������
2022/4/21
���գ��Ϻ������е�붯������ѧԺ�������о������������ڡ��ȹ�ӭ�����Ŷ������������ͻ�÷¡��ѧ��Carmel Majidi������Advanced Materials�ڿ��������һ�ָ�������������������ѹ��Ƥ�������ó��ߵ��ݻ�����ʵ���˳�����ѹ����ⷶΧ��������Ӧʱ�䡢�ߵ��ݻ��ߣ�nF-��F����������ȣ��������źż�⡢��㴫�����С��м���������֫�ִ�������������ȡ����ʵ��Ӧ�á����ġ�Cutaneo...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...